تحسين النتائح
ترتيب حسب
من
الى

Provides extensive quotes from the astronauts who drove the LRV on the Moon from interviews conducted especially for the book. It also details new material from interviews of engineers and managers at the Jet Propulsion Laboratory covering the robotic rovers, Sojourner, Sprit and Opportunity. The Foreword is written by David R. Scott, Commander of Apollo 15. Chapter 1: From Concept to Reality; Chapter 2: Lunar Roving Vehicle Subsystems; Chapter 3: Training for the Moon; Chapter 4: To the Hadley Plains; Chapter 4: Mysterious and Unknown Descartes; Chapter 5: Destiny at Taurus-Littrow; Chapter Six: The Quest for Mars-Chapter Seven: The New Vision of Exploration.
Modern control theory and in particular state space or state variable methods can be adapted to the description of many different systems because it depends strongly on physical modeling and physical intuition. The laws of physics are in the form of differential equations and for this reason, this book concentrates on system descriptions in this form. This means coupled systems of linear or nonlinear differential equations. The physical approach is emphasized in this book because it is most natural for complex systems. It also makes what would ordinarily be a difficult mathematical subject into one which can straightforwardly be understood intuitively and which deals with concepts which engineering and science students are already familiar.
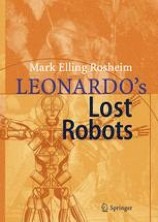
Reinterprets Leonardo's legacy of notes, showing that apparently unconnected fragments from dispersed manuscripts actually comprise cohesive designs for functioning automata. Using the rough sketches scattered throughout almost all of Leonardo's notebooks, the author has reconstructed Leonardo's programmable cart, which was the platform for other automata: a Robot Lion, a Robot Knight, and a hydraulically powered automaton for striking a bell.

Just over thirty years after Holland first presented the outline for Learning Classifier System paradigm, the ability of LCS to solve complex real-world problems is becoming clear. In particular, their capability for rule induction in data mining has sparked renewed interest in LCS. This book brings together work by a number of individuals who are demonstrating their good performance in a variety of domains.

A Differential-Geometric Approach for Bernstein’s Degrees-of-Freedom Problem.- Nonsmooth Riemannian Optimization with Applications to Sphere Packing and Grasping.- Synchronization of Networked Lagrangian Systems.- An Algorithm to Discretize One-Dimensional Distributed Port Hamiltonian Systems.- Virtual Lagrangian Construction Method for Infinitedimensional Systems with Homotopy Operators.- Direct Discrete-Time Design for Sampled-Data Hamiltonian Control Systems.- Kinematic Compensation in Port-Hamiltonian Telemanipulation.- Interconnection and Damping Assignment Passivity-Based Control of a Four-Tank System.- Towards Power-based Control Strategies for a Class of Nonlinear Mechanical Systems.- Power Shaping Control of Nonlinear Systems: A Benchmark Example.- Total Energy Shaping Control of Mechanical Systems: Simplifying the Matching Equations via Coordinate Changes.- Simultaneous Interconnection and Damping Assignment Passivity–Based Control: Two Practical Examples.
The investigation of multiscale problems in multibody system contacts is an interesting and timely topic which has been the subject of intensive research. This proceedings volume summarizes contributions of many authors active in the field and gives insight in very different areas of this fascinating research.
This monograph studies the design of robust, monotonically-convergent iterative learning controllers for discrete-time systems. Two key problems with the fundamentals of iterative learning control (ILC) design as treated by existing work are: first, many ILC design strategies assume nominal knowledge of the system to be controlled and; second, it is well-known that many ILC algorithms do not produce monotonic convergence, though in applications monotonic convergence is often essential. Iterative Learning Control takes account of the recently-developed comprehensive approach to robust ILC analysis and design established to handle the situation where the plant model is uncertain. Considering ILC in the iteration domain, it presents a unified analysis and design framework that enables designers to consider both robustness and monotonic convergence for typical uncertainty models, including parametric interval uncertainties, iteration-domain frequency uncertainty, and iteration-domain stochastic uncertainty.

This book is the first monograph ever on complex-valued neural networks, which lends itself to graduate and undergraduate courses in electrical engineering, informatics, control engineering, mechanics, robotics, bioengineering, and other relevant fields. It is useful for those beginning their studies, for instance, adaptive signal processing for highly functional sensing and imaging, control in unknown and changing environment, brainlike information processing, robotics inspired by human neural systems, and interdisciplinary studies to realize comfortable society. It is also helpful to those who carry out research and development regarding new products and services at companies.

In the twenty-first century, applications in medicine and engineering must acquire greater safety and flexibility if they are to yield better products at higher efficiency. To this end, complex science and technology must be integrated in medicine and engineering. Complex medical engineering (CME) is a new field that merges medical science and technology, and includes biomedical robotics and biomechatronics, complex virtual technology in medicine, information and communication technology in medicine, complex technology in rehabilitation, cognitive neuroscience and technology, and complex bioinformatics. Experts from academia, industry, and government research laboratories who have pioneered CME ideas and technologies describe its concept and research approach and discuss related hardware and software, science and technology, and medicine and engineering. This book will be invaluable to scientists, researchers, and graduates in the emerging field of CME.

This volume examines the difficulties that arise in creating highly complex engineered systems and new approaches that are being adopted. Topics addressed range from the formal representation and classification of distributed networked systems to revolutionary engineering practices inspired by biological evolution. By bringing together the latest research in Complex Engineered Systems, this book sheds light on the current state and future course of this emerging field.

Cells and Robots is an outcome of the multidisciplinary research extending over Biology, Robotics and Hybrid Systems Theory. It is inspired by modeling reactive behavior of the immune system cell population, where each cell is considered as an independent agent. In our modeling approach, there is no difference if the cells are naturally or artificially created agents, such as robots. This appears even more evident when we introduce a case study concerning a large-size robotic population scenario. Under this scenario, we also formulate the optimal control of maximizing the probability of robotic presence in a given region and discuss the application of the Minimum Principle for partial differential equations to this problem. Simultaneous consideration of cell and robotic populations is of mutual benefit for Biology and Robotics, as well as for the general understanding of multi-agent system dynamics.The text of this monograph is based on the PhD thesis of the first author. The work was a runner-up for the fifth edition of the Georges Giralt Award for the best European PhD thesis in Robotics, annually awarded by the European Robotics Research Network (EURON).
This monograph is devoted to the classical topic of impedance control, which has recently seen renewed interest following advances in the mechanical design of lightweight robotic systems with improved actuation and sensing capabilities.
In this book, we focus onhowtousebiomimicryof the functionaloperationofthe “hardwareandso- ware” of biological systems for the development of optimization algorithms and feedbackcontrolsystemsthatextendourcapabilitiestoimplementsophisticated levels of automation. The primary focus is not on the modeling, emulation, or analysis of some biological system. The focus is on using “bio-inspiration” to inject new ideas, techniques, and perspective into the engineering of complex automation systems. There are many biological processes that, at some level of abstraction, can berepresentedasoptimizationprocesses,manyofwhichhaveasa basicpurpose automatic control, decision making, or automation.

Creating some links between control feedback and biology modeling communities based on similarities in modeling, observing and perceiving alive structures, and analyzing interconnections between biological structures and subsystems was the main objective of this volume. The idea of this book was conceived in the context mentioned above with the objective to help in claiming many of the problems for control researchers, starting discussions and opening interactive debates between the control and biology communities, and, finally, to alert graduate students to the many interesting ideas at the frontier between control feedback theory and biology.
This book deals with the theoretical and methodological aspects of incorporating intelligence in Autonomous Robots and Agents. Challenges faced in the real world to accomplish complex tasks, which require collaborative efforts, and methods to overcome them, are detailed. Several informative articles deal with navigation, localization and mapping of mobile robots, a problem that engineers and researchers are grappling with all the time.This edited volume is targeted to present the latest state-of-the-art methodologies in Robotics. It is a compilation of the extended versions of the very best papers selected from the many that were presented at the 3rd International Conference on Autonomous Robots and Agents (ICARA 2006) which was held at Palmerston North, New Zealand from 11-14 December, 2006. Scientists and engineers who work with mobile robots will find this book very useful and stimulating.

The purpose of this book is to address the challenging problem of Autonomous Navigation in Dynamic Environments, and to present new ideas and approaches in this newly emerging technical domain. The book surveys the state-of-the-art, discusses in detail various related challenging technical aspects, and addresses upcoming technologies in this field. The aim of the book is to establish a foundation for a broad class of mobile robot mapping and navigation methodologies for indoor, outdoor, and exploratory missions.Three main topics located on the cutting edge of the state of the art are addressed, from both the theoretical and technological point of views: Dynamic world understanding and modelling for safe navigation, Obstacle avoidance and motion planning in dynamic environments, and Human-robot physical interactions. Several models and approaches are proposed for solving problems such as Simultaneous Localization and Mapping (SLAM) in dynamic environments, Mobile obstacle detection and tracking, World state estimation and motion prediction, Safe navigation in dynamic environments, Motion planning in dynamic environments, Robust decision making under uncertainty, and Human-Robot physical interactions.

Automated Nanohandling by Microrobots introduces an actuation principle for such microrobots and presents a new robot design. Different aspects of this research field regarding the hardware and software implementation of the system components, including the sensory feedback for automated nanohandling, are discussed in detail. Extensive applications of the microrobot station for nanohandling, nano-characterization and nanostructuring are provided, together with the experimental results.
This book is written from an engineer's perspective of the mind. "Artificial Mind System" exposes the reader to a broad spectrum of interesting areas in general brain science and mind-oriented studies. In this research monograph a picture of the holistic model of an artificial mind system and its behaviour is drawn, as concretely as possible, within a unified context, which could eventually lead to practical realisation in terms of hardware or software. With a view that "the mind is a system always evolving", ideas inspired by many branches of studies related to brain science are integrated within the text, i.e. artificial intelligence, cognitive science / psychology, connectionism, consciousness studies, general neuroscience, linguistics, pattern recognition / data clustering, robotics, and signal processing.

This volume contains both invited and selected extended papers from the last 3IA Conference (3IA’2008), together with an introduction presenting the area of Intelligent Computer Graphics and various Computer Graphics areas where introduction of intelligent techniques permitted to resolve important problems.

This volume presents the proceedings of the 9th Online World Conference on Soft Computing in Industrial Applications (WSC9), September 20th - October 08th, 2004, held on the World Wide Web. It contains plenary lectures, original papers and tutorials presented during the conference. The book brings together outstanding research and developments in the field of soft computing (evolutionary computation, fuzzy logic, neural networks, and their fusion) and its applications in science and technology.

سوريا - اتستراد درعا - غباغب
+963-15 2050 - 15 860 380 /1/2/3 - 11 662 3900